We recently managed to integrate ROS2 communication into the UE5-based virtual testbed. This was achieved using and extending the rclUE plugin. ROS2 greatly improves the ability of efficient, decentral communication between all agents of our eventually developed autonomous swarm.
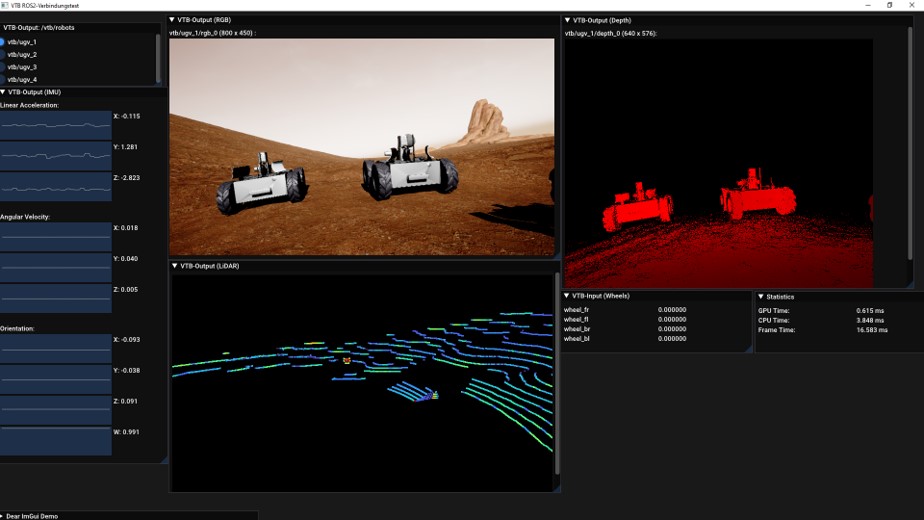
Moreover, we developed and integrated the first swarm unit, a rover, including simulations of various sensors. Specifically, RGB and depth cameras, a Lidar sensor, and an IMU. The collision and friction with the Mars terrain are simulated, too, using the physics engine of the UE5. Although the simulations are rather simple for now, they will be extended incrementally over time.
In order to test the ROS2 communication, we also developed a small external testing application, with which steering commands can be sent to the simulated rover and which shows the sensor output.