The latest episode of the renowned space exploration podcast Auf Distanz offers a front-row seat to the future of Mars exploration. In a comprehensive feature spanning over 80 minutes, host Lars Naber explores the technical heart of the VaMEx initiative and the results of our recent field campaigns.
While mainstream media often focuses on the “cool factor” of robots in a quarry, Episode 0133: Valles Marineris Explorer (VaMEx) and the DLR Explorer Initiatives goes much deeper. Lars Naber joined our team during our intensive field tests in Middle Franconia to capture the atmosphere, the sound of the rotors, and the complex engineering challenges that come with simulating a mission to the Red Planet.
Exploring the “Swarm Symphony”
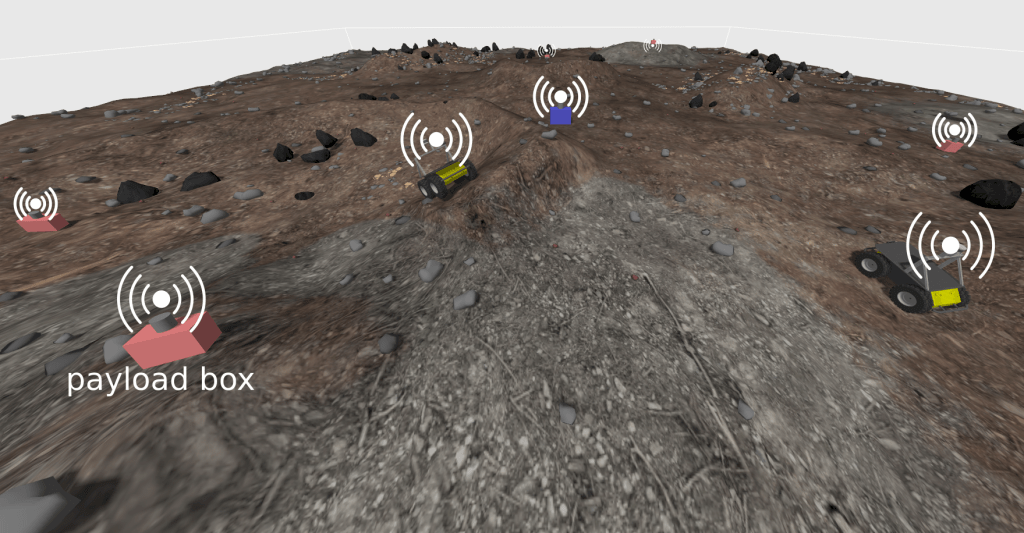
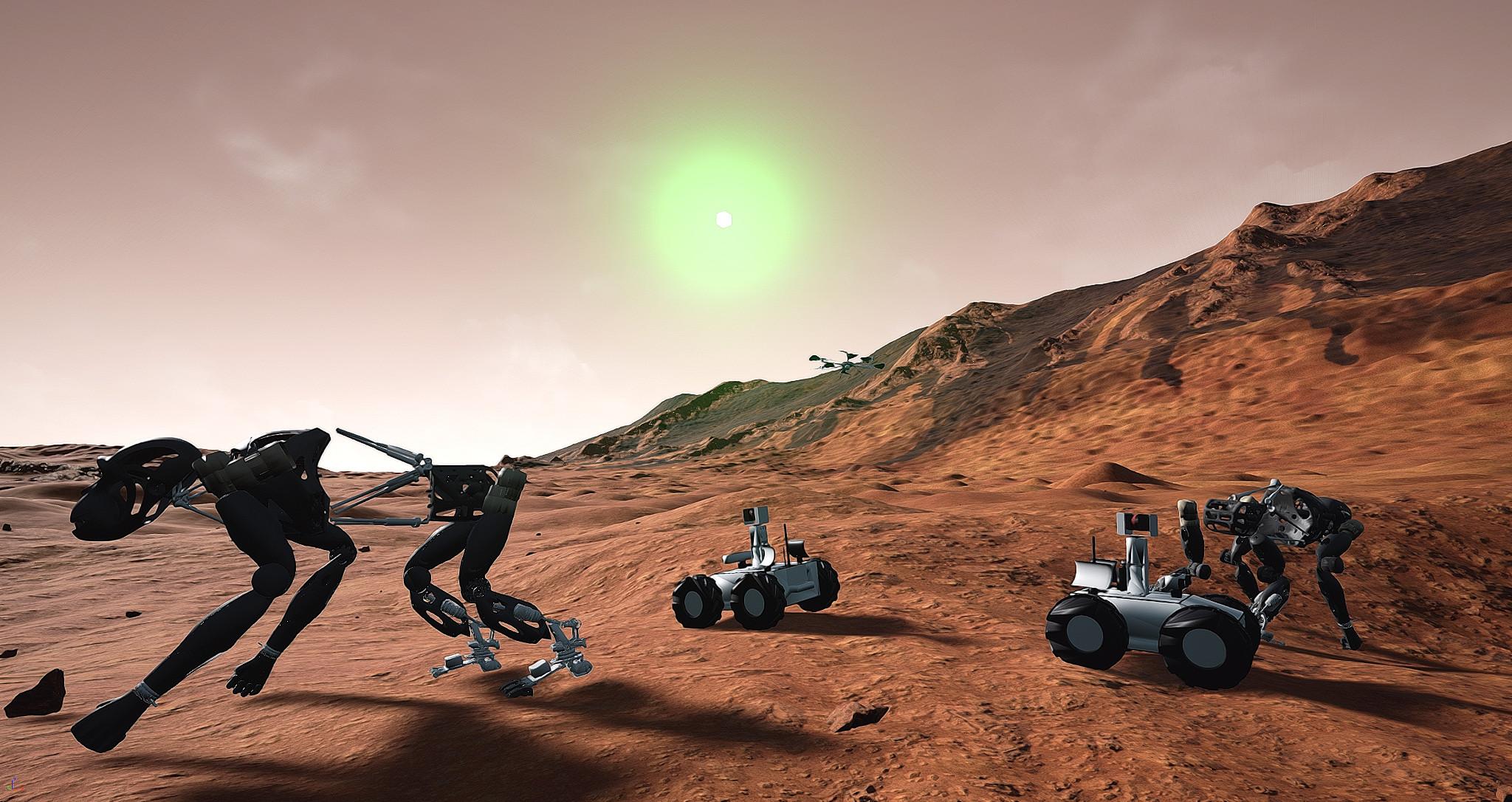
The episode centers on the core objective of the VaMEx-3 phase: the seamless coordination of a heterogeneous swarm. This “symphony” of autonomous rovers and multicopters must navigate, map, and communicate in extreme environments—all without the help of GPS or constant human intervention.
The podcast features in-depth interviews with key figures of the mission:
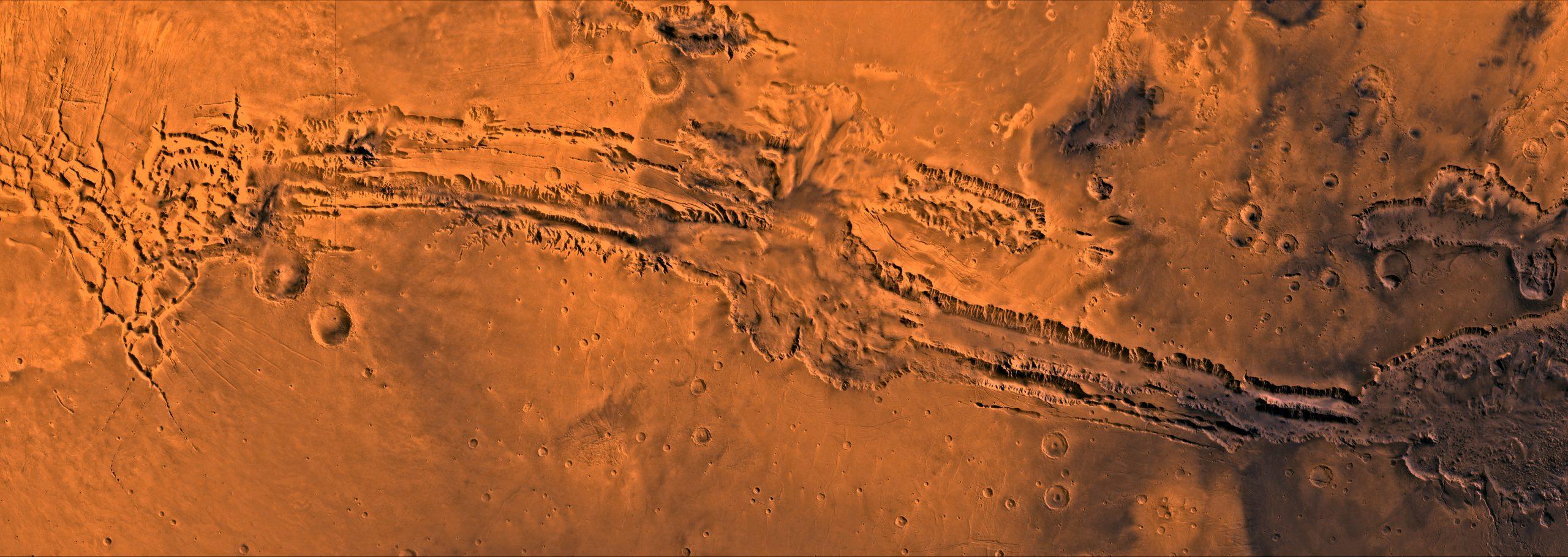
- Dr. Oliver Funke (German Space Agency at DLR) discusses the strategic importance of the Explorer initiatives and why Valles Marineris—the largest canyon in the solar system—is a prime target for discovering water and potential signs of life.
- Researchers from the University of Würzburg and other partner institutions explain the “brains” behind the robots, detailing how they handle autonomous decision-making when direct communication with Earth is cut off by towering canyon walls.
Highlights of the Episode
Listeners can expect a detailed breakdown of several critical mission components:
- Autonomous Navigation: How SLAM (Simultaneous Localization and Mapping) and LiDAR sensors allow the robots to “see” and understand unknown terrain.
- The Power of the Swarm: Why a group of specialized, lower-cost robots is more resilient and effective than a single, traditional rover.
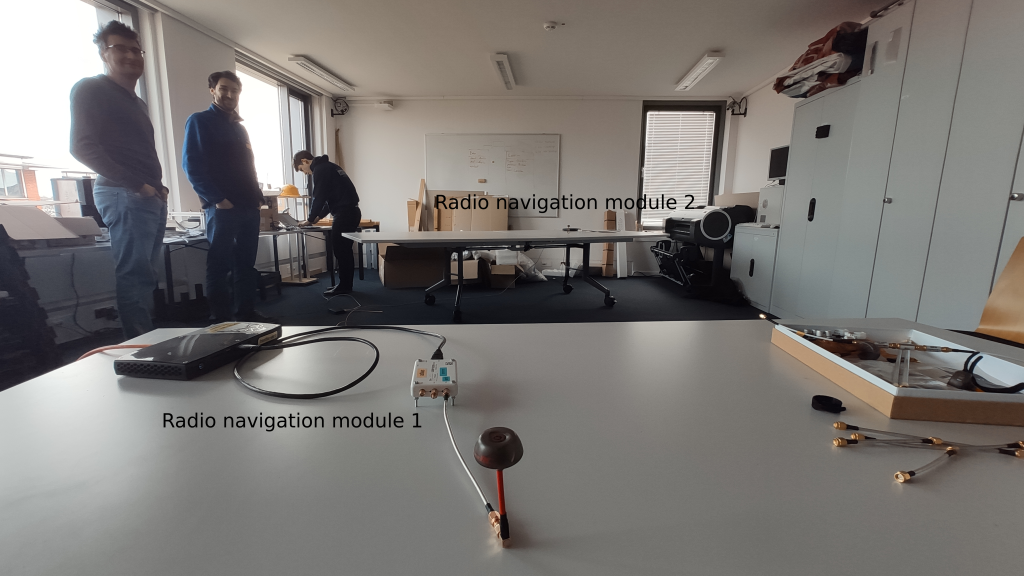
- From Lab to Field: The reality of “Analog Astronautics”—dealing with dust, hardware glitches, and the unpredictable nature of real-world testing.
Listen Now
For project partners, space enthusiasts, and anyone interested in the cutting edge of robotics, this episode provides the most detailed audio documentation of the VaMEx-3 project to date. It is a testament to the collaborative effort driving Germany’s contributions to planetary exploration.
Listen to the full episode here: Auf Distanz 0133 – VaMEx und die DLR Explorer-Initiativen
We would like to thank Lars Naber for visiting us in the field and for producing such an insightful feature on our work at the frontier of autonomous robotics!