The University of Bremen and its partners are advancing new research for the exploration of both the Moon and Mars, as highlighted in a recent Handelskammer article. In both domains, teams are developing efficient and reliable methods for deploying autonomous robots under the harsh environmental conditions of extraterrestrial bodies.
In collaboration with the DLR and DFKI, researchers from the University of Bremen contributed to a regolith-processing robotic system that Team Bremen successfully demonstrated during the ESA Space Resources Challenge. Their approach illustrates how the autonomous robots could gather and sort lunar soil to support resource extraction essential for sustainable lunar exploration.
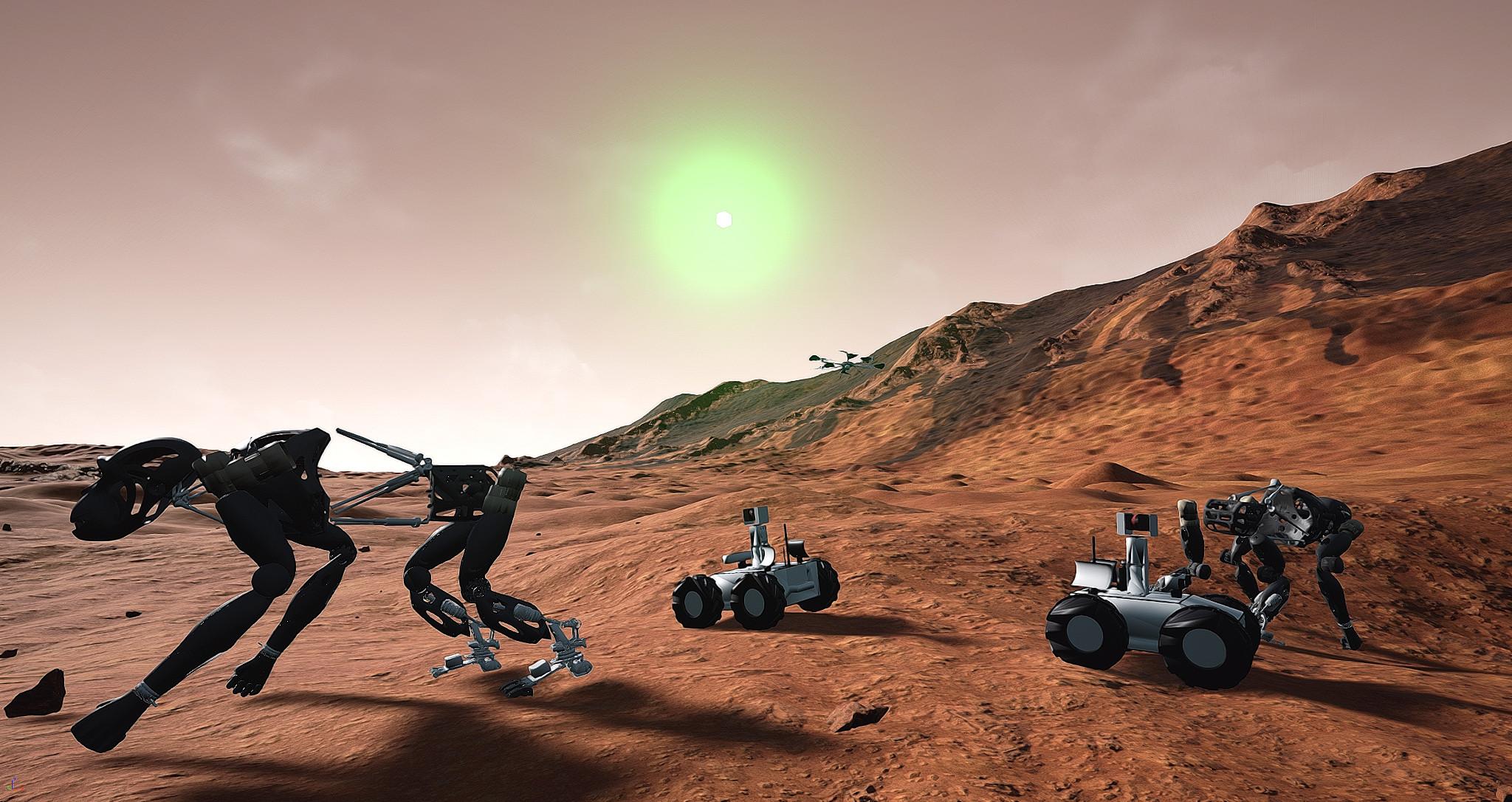
For Mars exploration, the VaMEx-3 consortium — comprising its broad network of partners — recently validated the capabilities and interaction of its systems in a stone pit selected for its similarity to Martian terrain. The large-scale experiment brought together 14 robots operating across the physical test site and its virtual Mars twin, showcasing the impressive coordination required for future missions.
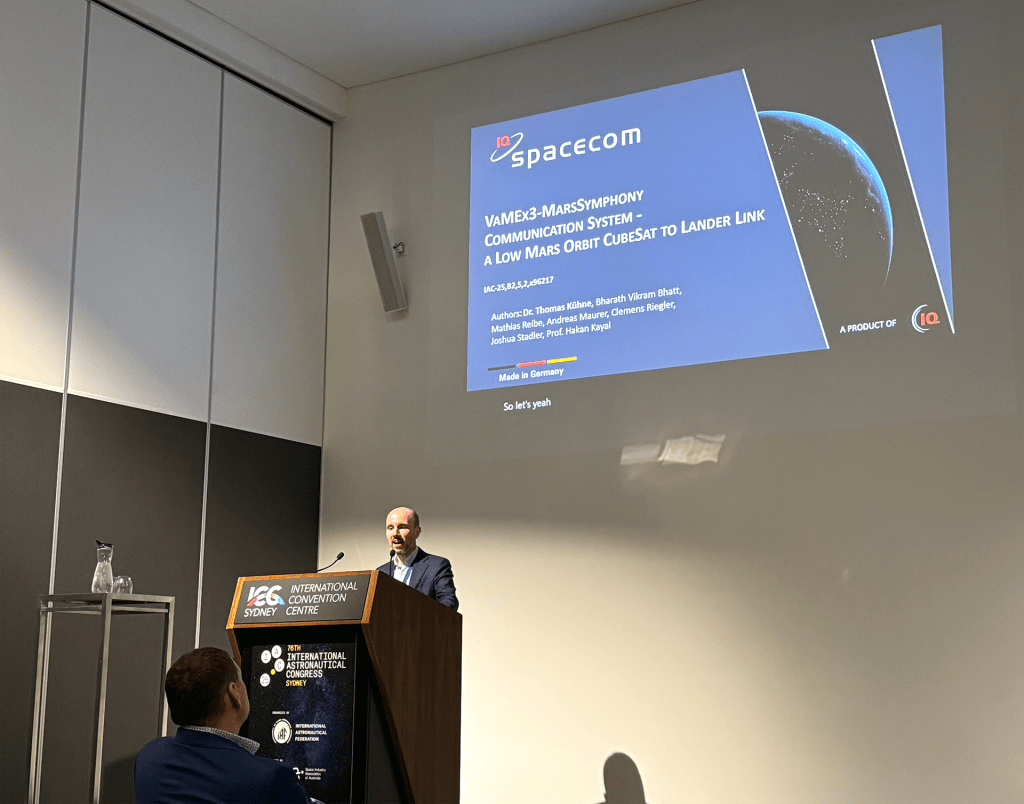
The VaMEx3-MarsSymphony team at the IAC included: Clemens Riegler (JMU), Dr.-Ing. Thomas Kühne (IQ spacecom), Prof. Dr.-Ing. Hakan Kayal (JMU), and Mathias Reibe (IQ spacecom).IQ spacecom’s Dr.-Ing. Thomas Kühne holding his paper presentation.DLR’s Scout Rover at the exhibition.
The VaMEx-3 MarsSymphony research project was well represented at the 2025 International Astronautical Congress (IAC) in Sydney, with contributions from several partners. During the technical sessions, multiple team members presented various aspects of the project. Dr.-Ing. Thomas Kühne from IQ spacecom presented his paper, “VaMEx-3 Mars Symphony Communication System: A Low Mars Orbit CubeSat to Lander Link,” which outlined the Mars Symphony communication concept that enables reliable data transmission between an orbiter and a lander on Mars. Prof. Dr.-Ing. Hakan Kayal from Julius-Maximilians-Universität Würzburg presented “Exploring Transient Phenomena in the Martian Atmosphere,” introducing the SkyCam sky observation system and presenting expected phenomena in the Martian atmosphere. Clemens Riegler, also from the Julius-Maximilians-Universität Würzburg, presented the paper “Towards Autorotation Landers for Communication and Sensor Networks on Mars,” describing a novel autorotation flight system for Martian landers.
At the IAC exhibition, IQ spacecom discussed the progress of the VaMEx-3 MarsSymphony communication solution with visitors at the company’s booth in the German Pavilion by BDLI. With the DLR’s Scout Rover on display nearby, the VaMEx-3 project was represented across multiple facets of the mission, including robotics and communications.
The IAC 2025 provided a splendid opportunity for the entire IQ spacecom (IQ Technologies for Earth and Space GmbH) and Julius Maximilian University Würzburg (JMU) team to present the VaMEx-3 MarsSymphony project and discuss its progress together.
We are excited to unveil our innovative multi-user VaMEx experience, developed in collaboration with the DLR School Lab and the LUNA Analog Facility. Through this project, we aim to make space exploration tangible for children and young adults, inspiring them to become the space scientists of tomorrow.
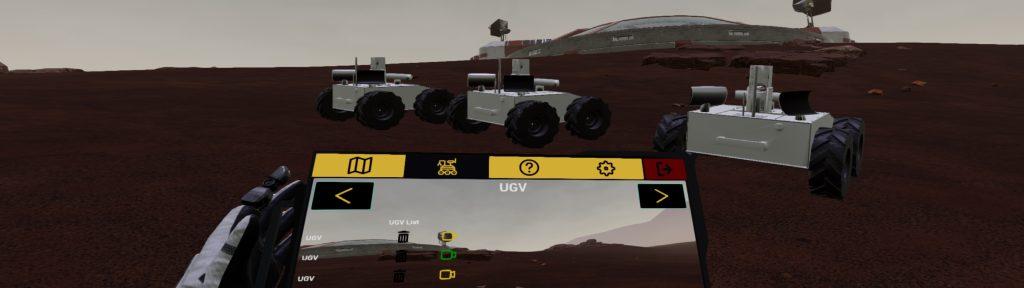
The video shows a complete simulation of the Mars mission in the Virtual Testbed. Even though the VTB and the algorithms are still work-in-progress, the preliminary results look very promising already.
Last week, the Cognitive Neuroinformatics (CNI) of the University of Bremen group and the DLR Institute of Communications and Navigation (DLR-KN) conducted a significant field test at the DLR site in Oberpfaffenhofen.
Several Summit-XL rovers at testing site
During the field test, we successfully integrated and validated several key components critical to our VaMEx3 RGE mission:
Sensor and hardware integration: Several sensors such as LIDAR, IMU and GNSS for ground truth generation, and radio ranging devices were integrated on the rovers. Additionally, hardware devices for WIFI-like communication were integrated and used successfullly.
Ground truth generation: The CNI implemented a robust method for ground truth generation by combining GNSS (Global Navigation Satellite System) and IMU (Inertial Measurement Unit) data. This fusion allowed for precise localization and accurate environmental mapping, crucial for validating our algorithms. Real-time kinematic (RTK) corrections are used for ground truth generation.
Radio ranging: The radio ranging functionality of DLR-KN was thoroughly tested and yielded promising results. The integration was seamless between the Cognitive Neuroinformatics (CNI) rovers and the DLR-KN rovers, demonstrating effective communication and distance measurements in various field conditions. It was the first time the radio ranging was tested in ROS2.
One of the highlights of our field test was the live test of multi-robot SLAM (Simultaneous Localization and Mapping). In a dual-robot scenario, we tested the real-time capabilities of our SLAM algorithms. The results were encouraging, showing the potential for cooperative exploration and mapping in unknown environments using multiple robots. The data collected during these tests will be instrumental in refining our algorithms further.
Preliminary Dataset Collection for Future Development
We successfully recorded a preliminary dataset during the test, which will be invaluable for ongoing development and future testing phases. This dataset includes data from all integrated sensors and systems, providing a rich source of information to enhance the robustness and reliability of our ground exploration technology.
Challenges Encountered: ROS2 Communication
While we achieved many of our objectives, we also encountered a significant challenge: ROS2 communication issues. With numerous active devices attempting to exchange data, we faced problems related to bandwidth and data synchronization. These issues highlighted areas where further optimization is needed to ensure smooth communication in more complex scenarios.
Moving Forward
Despite the communication challenges, our field test provided critical insights and validation of the hardware and algorithms that form the backbone of the VaMEx3 RGE project. The lessons learned will guide us in refining our systems for even more robust and reliable ground exploration in the future.
We look forward to the next phase of testing and development, building on these successes and continuing our collaboration in VaMEx3 to advance the state of autonomous ground exploration.
Stay tuned for more updates as we continue to explore new frontiers in multi-robot systems and autonomous exploration!
VaMEx was represented at the 21st International Planetary Probe Workshop (IPPW) in Williamsburg, USA, with our poster, “Will it work? Flexible Design and Initial Evaluation of a COTS-Mars UAV Navigation System”. The poster detailed our iterative Fault Tree Analysis-based design approach for a Mars UAV navigation system and presented initial performance results of the navigation filter. The early-stage application of the Fault Tree Analysis approach garnered significant interest during the poster session.
Additionally, a second poster related to VaMEx was contributed by future VaMEx project partner Clemens Riegler, titled “Downrange Capability Simulation of Autorotation vs. Propulsion”. This poster compared the flight ranges of classical propulsion, and autorotation landing systems. Clemens Riegler’s work earned him the “1st Place: Outstanding Student Poster Presentation” Award.
Max Hofacker and Clemens Riegler further represented VaMEx in their roles as session conveners for the Mars and Innovative Concepts for Exploration sessions, respectively. The IPPW provided a lot of opportunities for networking and exchange with international partners, including NASA, ESA, JAXA, JPL, and APL, facilitating discussions on current planetary exploration approaches and emerging trends.
The next IPPW will be held in Stuttgart, Germany, from June 23rd to June 27th, 2025.
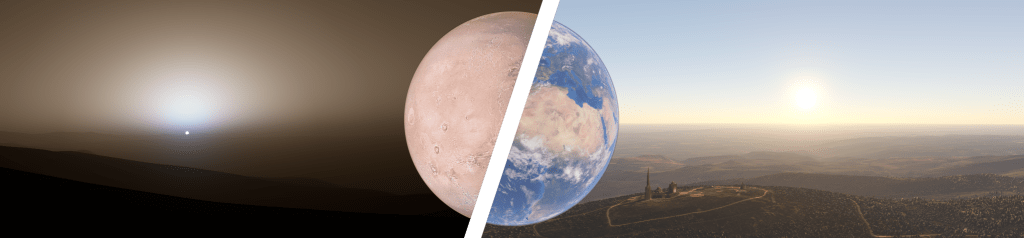
Our paper on Physically Based Real-Time Rendering of Atmospheres using Mie Theory has been presented at the 2024 Eurographics Conference and published in the 43th issue of the Computer Graphics Forum journal. In this paper, we present a novel approach for simulating light scattering in an atmosphere which is not only suitable for Earth’s atmosphere but can also be applied to the Martian atmosphere. To the best of our knowledge, this is the first time that a physically based rendering of the Martian atmosphere has been presented in real-time.
For VaMEx, we implemented this new approach into the Mission-Control Tool which will significantly enhance the realism of the visualizations. This allows scientists to better plan their missions and to better understand the data they receive from the swarm.
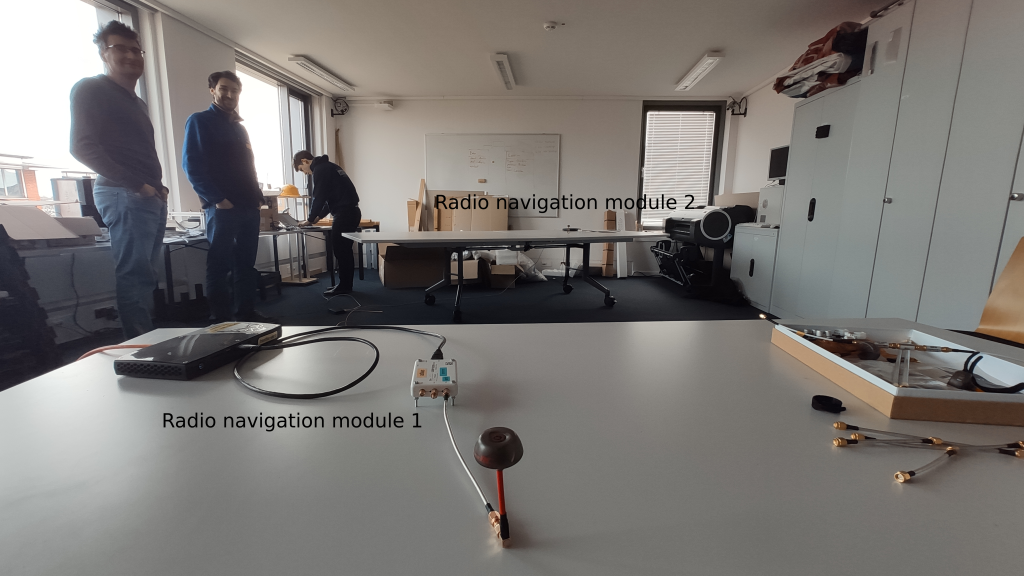
In late February, the DLR-Kommunikation und Navigation and Cognitive Neuroinformatics group (CNI) performed integration tests concerning the radio navigation and RTK setup in preparation of the VaMEx3 field tests. We conducted tests at CNI in Bremen, using two radio navigation modules comprising a USRP, a Nuc Computer, and a radio antenna. These modules transfer ranging measurements between each others and will eventually be integrated onto the Robotnik Summit XL rovers. During the upcoming field tests additional seven payload boxes will be deployed, each equipped with the radio navigation module. Through exchange of ranging information a successful navigation will be performed as well as positioning of the rovers will be robustified.
Successful test of radio communication and ranging.
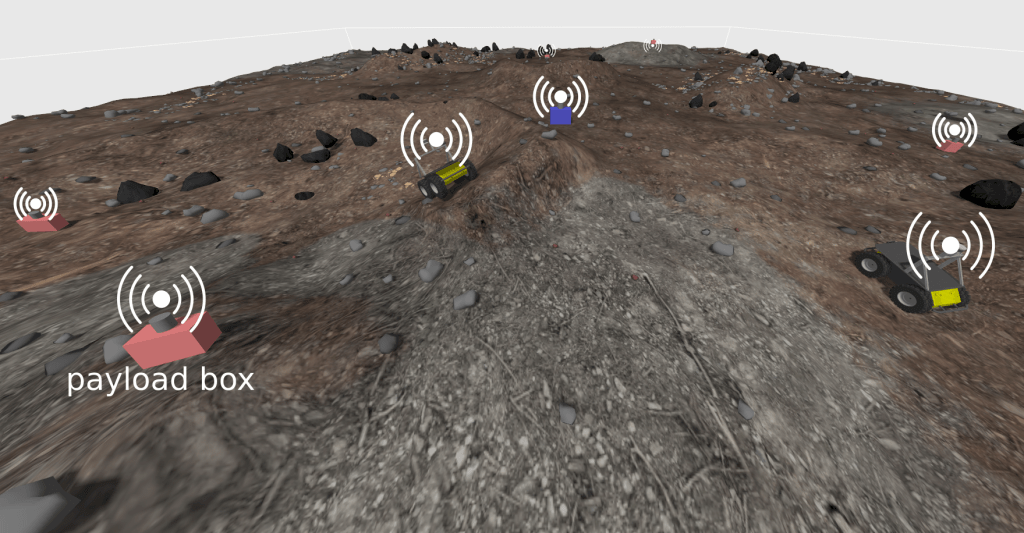
Moreover, the multi-robot graph simulation in Gazebo Fortress was extended to assess the radio navigation outside of field tests. We designed a preliminary model of the payload boxes, which is able to publish its pose in Gazebo. A ROS2 node receiving the position information via the Gazebo ROS bridge, computes ranges between the payload boxes, and publishes them. These ranging measurements can enhance SLAM and positioning robustness for the multi-robot graph SLAM or other algorithms. We plan to implement the interfaces for the multi-robot operations in the near future.
Rovers and payload boxes in Gazebo simulation performing ranging between each other.
Lastly, we tested the GNSS Real-Time Kinematic (RTK) setup of the DLR-KN. We used the RTK corrections with the ZED-F9P and a Moasic H5 receiver. The receivers correctly utilized the corrections, resulting in a reported accuracy of approximately 1cm.
Testing setup for RTK correction data with a dual band GNSS antenna setup.
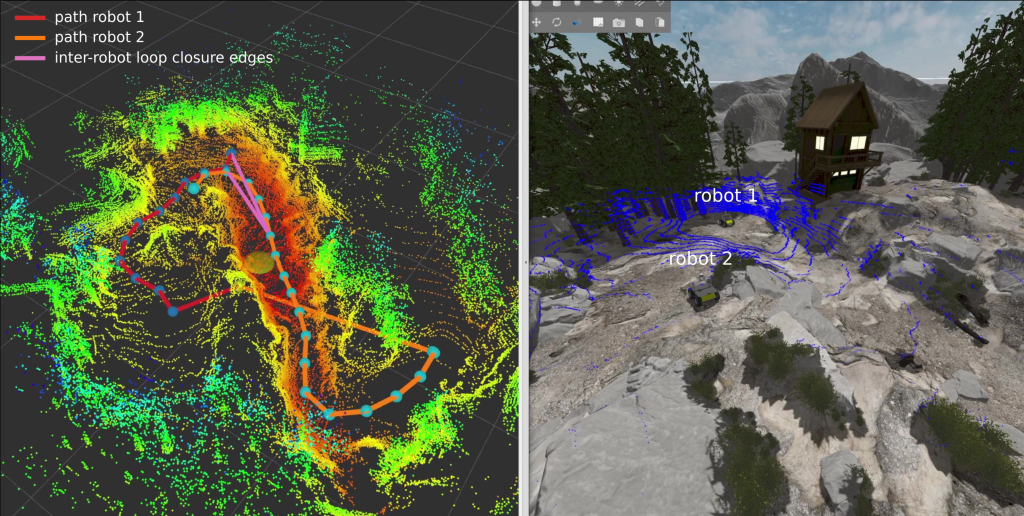
The paper titled “Multi-Robot Graph SLAM using LIDAR” was presented at the International Conference on Automation, Robotics, and Applications (ICARA 2024) in Athens, Greece. This algorithm adopts a decentralized approach, where each robot independently executes its instance of the SLAM process. Through the exchange of SLAM information, each robot constructs a detailed map of its surrounding environment from its own perspective.
The algorithm is deployed in VaMEx3. Check out the source code for this project on GitHub. Feel free to explore and contribute to this collaborative effort in advancing robotics technology.
Above you can see multi-robot graph SLAM simulation results. Nodes, edges, and SLAM point cloud of robot 1 visualized in rviz on the left. The simulation environment and two robots exploring the map are displayed on the right. Only results of robot 1 are visualized, while all information from robot 2 is integrated via the cooperative SLAM.
Looking ahead, the SLAM system is planned to be enhanced to incorporate additional sensor modalities, such as RADAR, radio navigation, and inertial measurement units, to further improve mapping accuracy and robustness.
In October 2023 we were able to present a VR demo of our VTB at the fall synergy meeting of the DLR Explorer initiatives. This was a complete success, as there was a lot of interest and positive feedback. The demo included our Mars surface based on HiRISE data, natural phenomena such as sandstorms, VR locomotion and interaction, as well as the latest versions of the swarm members exploring the environment.